
 Aucun Pompe de piscine avec filtre à sable, pompe à eau à haut débit 1,5hp-2,5hp, 1850W, pour jacuzzi,Pompe de piscine avec filtre à sable, pompe à eau à haut débit 1,5hp-2,5hp, 1850W, pour jacuzzi,
Aucun Pompe de piscine avec filtre à sable, pompe à eau à haut débit 1,5hp-2,5hp, 1850W, pour jacuzzi,Pompe de piscine avec filtre à sable, pompe à eau à haut débit 1,5hp-2,5hp, 1850W, pour jacuzzi, Pentair Filtre à sable Triton 2 Clear ProLe filtre à sable Triton 2 clear pro est tout simplement le meilleur filtre à sable du marché. Plus besoin de floculant car il filtre à 10µ contre 40µ sur un filtre à sable classique. L'eau est donc très limpide. Découvrez également nos autres filtres à sables.
Pentair Filtre à sable Triton 2 Clear ProLe filtre à sable Triton 2 clear pro est tout simplement le meilleur filtre à sable du marché. Plus besoin de floculant car il filtre à 10µ contre 40µ sur un filtre à sable classique. L'eau est donc très limpide. Découvrez également nos autres filtres à sables.- Pentair Filtre à sable Triton 2 Clear ProLe filtre à sable Triton 2 clear pro est tout simplement le meilleur filtre à sable du marché. Plus besoin de floculant car il filtre à 10µ contre 40µ sur un filtre à sable classique. L'eau est donc très limpide. Découvrez également nos autres filtres à sables.
 N°22 - Bloc moteur robot Dolphin S100Bloc moteur pour le robot Dolphin S100 performant. Numéro 22 sur l'image
N°22 - Bloc moteur robot Dolphin S100Bloc moteur pour le robot Dolphin S100 performant. Numéro 22 sur l'image SEVENMOONS Piscine à moteur électrique gonflable pour adultes, bateau à moteur, eau flottante, jet skiPiscine à moteur électrique gonflable pour adultes, bateau à moteur, eau flottante, jet ski
SEVENMOONS Piscine à moteur électrique gonflable pour adultes, bateau à moteur, eau flottante, jet skiPiscine à moteur électrique gonflable pour adultes, bateau à moteur, eau flottante, jet ski Aucun Joint torique de pompe de filtre de piscine en forme de L, remplacement 11412 adapté pour moteur deJoint torique de pompe de filtre de piscine en forme de L, remplacement 11412 adapté pour moteur de
Aucun Joint torique de pompe de filtre de piscine en forme de L, remplacement 11412 adapté pour moteur deJoint torique de pompe de filtre de piscine en forme de L, remplacement 11412 adapté pour moteur de Aucun Pompe à filtre de piscine 2HP, moteur avec filtre, pompes à eau d'aquarium Hi-Flo pour purificateurPompe à filtre de piscine 2HP, moteur avec filtre, pompes à eau d'aquarium Hi-Flo pour purificateur
Aucun Pompe à filtre de piscine 2HP, moteur avec filtre, pompes à eau d'aquarium Hi-Flo pour purificateurPompe à filtre de piscine 2HP, moteur avec filtre, pompes à eau d'aquarium Hi-Flo pour purificateur Zodiac N°5 - Logement central moteur robot MX8Logement central moteur pour votre robot de piscine Zodiac MX8. Pièce N°5 sur l'image. Référence Zodiac: W79023.
Zodiac N°5 - Logement central moteur robot MX8Logement central moteur pour votre robot de piscine Zodiac MX8. Pièce N°5 sur l'image. Référence Zodiac: W79023. HBM Pompe à eau 196cc. 6,5 HP avec moteur essenceCette pompe à eau centrifuge auto-amorçante HBM est équipée d'un puissant moteur à essence 196 cc OHV. La machine convient aussi bien à un usage privé que commercial, par exemple pour une piscine ou un chantier de construction. Grâce à la taille (50 mm) de l'entrée et de la sortie, la machine fournit une puissance de pompage impressionnante et fiable ; avec un débit de 500 L par minute, vous pouvez transférer rapidement une piscine d'eau. Cette pompe à eau ne convient pas à une utilisation avec de l'eau de mer ou d'autres produits chimiques, car cela pourrait endommager les composants internes. Cependant, elle peut pomper des particules jusqu'à 7 mm de diamètre et offre une hauteur d'aspiration de 7 m et une hauteur totale de 23 m. Avec un poids de 29 kg seulement, il s'agit d'une pompe à eau légère conçue pour le transport et le stockage. Le cadre ouvert robuste protège la pompe contre les chocs et les bosses et sert également de poignée pratique.
HBM Pompe à eau 196cc. 6,5 HP avec moteur essenceCette pompe à eau centrifuge auto-amorçante HBM est équipée d'un puissant moteur à essence 196 cc OHV. La machine convient aussi bien à un usage privé que commercial, par exemple pour une piscine ou un chantier de construction. Grâce à la taille (50 mm) de l'entrée et de la sortie, la machine fournit une puissance de pompage impressionnante et fiable ; avec un débit de 500 L par minute, vous pouvez transférer rapidement une piscine d'eau. Cette pompe à eau ne convient pas à une utilisation avec de l'eau de mer ou d'autres produits chimiques, car cela pourrait endommager les composants internes. Cependant, elle peut pomper des particules jusqu'à 7 mm de diamètre et offre une hauteur d'aspiration de 7 m et une hauteur totale de 23 m. Avec un poids de 29 kg seulement, il s'agit d'une pompe à eau légère conçue pour le transport et le stockage. Le cadre ouvert robuste protège la pompe contre les chocs et les bosses et sert également de poignée pratique. Maytronics N°23 - Bloc moteur pour robot Dolphin S200 ou S300Bloc moteur pour les robots Dolphin S200 ou S300 fabriquée par Maytronics numéro 23 sur l'image Référence fabricant : 9995387-ASSY
Maytronics N°23 - Bloc moteur pour robot Dolphin S200 ou S300Bloc moteur pour les robots Dolphin S200 ou S300 fabriquée par Maytronics numéro 23 sur l'image Référence fabricant : 9995387-ASSY Maytronics N°19 - Bloc moteur Dolphin S50Bloc moteur S50 par Maytronics numéro 19 sur l'image Référence fabricant : 9995389-ASSY.
Maytronics N°19 - Bloc moteur Dolphin S50Bloc moteur S50 par Maytronics numéro 19 sur l'image Référence fabricant : 9995389-ASSY. Maytronics N°16 - Grille de protection moteur robot Dolphin 2001Grille de protection moteur pour robot Dolphin 2001. Pièce N°16 sur l'image. Référence fabricant: 6203703.
Maytronics N°16 - Grille de protection moteur robot Dolphin 2001Grille de protection moteur pour robot Dolphin 2001. Pièce N°16 sur l'image. Référence fabricant: 6203703. Franklin Electric Moteur Franklin pour pompe immergée 4" 1.10 kW MonoMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 1.10 kW. Tension: 230 V Livré avec amorce de câble.
Franklin Electric Moteur Franklin pour pompe immergée 4" 1.10 kW MonoMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 1.10 kW. Tension: 230 V Livré avec amorce de câble.- Franklin Electric Moteur Franklin pour pompe immergée 4" 1.10 kW TriMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 1.10 kW. Tension: 400 V. Livré avec amorce de câble.
- Franklin Electric Moteur Franklin pour pompe immergée 4" 1.5 kW TriMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 1.50 kW. Tension: 400 V. Livré avec amorce de câble.
- Franklin Electric Moteur Franklin pour pompe immergée 4" 2.2 kW MonoMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 2.2 kW. Tension: 230 V Livré avec amorce de câble.
- Franklin Electric Moteur Franklin pour pompe immergée 4" 0.55 kW MonoMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 0.55 kW. Tension: 230 V. Livré avec amorce de câble.
- Franklin Electric Moteur Franklin pour pompe immergée 4" 0.55 kW TriMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 0.55 kW. Tension: 400 V. Livré avec amorce de câble.
 Maytronics Prise câble moteur complète Dolphin S50/S100/ S200/S300Prise pour câble moteur complète compatible avec S50/S100/ S200/S300 fabriqué par Maytronics numéro 15 sur l'image Référence fabricant : 9991271.
Maytronics Prise câble moteur complète Dolphin S50/S100/ S200/S300Prise pour câble moteur complète compatible avec S50/S100/ S200/S300 fabriqué par Maytronics numéro 15 sur l'image Référence fabricant : 9991271.- Franklin Electric Moteur Franklin pour pompe immergée 4" 0.75 kW TriMoteur Franklin pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 0.75 kW. Tension: 400 V. Livré avec amorce de câble.
- Franklin Electric Moteur Franklin pour pompe immergée 4" 0.37 kW TriMoteur Franklin triphasé pour pompe immergée de 4 pouces. Moteur à bain d'eau. Puissance de 0.37 kW. Tension: 400 V. Livré avec amorce de câble.
 IHOMEINF Hélice marine électrique pour bateau d'assaut, hors-bord, moteur hors-bord pour bateaux gonflables,Hélice marine électrique pour bateau d'assaut, hors-bord, moteur hors-bord pour bateaux gonflables,
IHOMEINF Hélice marine électrique pour bateau d'assaut, hors-bord, moteur hors-bord pour bateaux gonflables,Hélice marine électrique pour bateau d'assaut, hors-bord, moteur hors-bord pour bateaux gonflables, hohochai Solénoïde d'arrêt de carburant 366-07197 SA-3405-T, solénoïde d'arrêt 12V/24V, pièce de moteurSolénoïde d'arrêt de carburant 366-07197 SA-3405-T, solénoïde d'arrêt 12V/24V, pièce de moteur
hohochai Solénoïde d'arrêt de carburant 366-07197 SA-3405-T, solénoïde d'arrêt 12V/24V, pièce de moteurSolénoïde d'arrêt de carburant 366-07197 SA-3405-T, solénoïde d'arrêt 12V/24V, pièce de moteur Winibo Moteur hors-bord électrique avec brosse pour bateaux de pêche gonflables, moteur de pêche à laMoteur hors-bord électrique avec brosse pour bateaux de pêche gonflables, moteur de pêche à la
Winibo Moteur hors-bord électrique avec brosse pour bateaux de pêche gonflables, moteur de pêche à laMoteur hors-bord électrique avec brosse pour bateaux de pêche gonflables, moteur de pêche à la Aideepen Régulateur de vitesse de moteur DC 9-55V 40A 2000W PWM DC, contrôle de vitesse linéaire hauteRégulateur de vitesse de moteur DC 9-55V 40A 2000W PWM DC, contrôle de vitesse linéaire haute
Aideepen Régulateur de vitesse de moteur DC 9-55V 40A 2000W PWM DC, contrôle de vitesse linéaire hauteRégulateur de vitesse de moteur DC 9-55V 40A 2000W PWM DC, contrôle de vitesse linéaire haute Zodiac Coffret commande robot CyclonXCoffret de commande pour robot CyclonX de chez Zodiac. Référence fabricant : R0633001. Attention un coffret de commande qui clignote et le robot qui ne démarre pas est une panne au niveau du bloc moteur et non une panne du coffret de commande.
Zodiac Coffret commande robot CyclonXCoffret de commande pour robot CyclonX de chez Zodiac. Référence fabricant : R0633001. Attention un coffret de commande qui clignote et le robot qui ne démarre pas est une panne au niveau du bloc moteur et non une panne du coffret de commande. Pool Style Pompe à chaleur Poolstyle Inverter• La pompe à chaleur Poolstyle Inverter s'adapte aux piscines jusqu'à 120m³ • Un moteur de ventilation à 3 vitesses • Une Economie d'énergie de 50 à 70% • Une pression acoustique de 18 à 36 dB à 10 m • Dégivrage automatique par inversion de cycle
Pool Style Pompe à chaleur Poolstyle Inverter• La pompe à chaleur Poolstyle Inverter s'adapte aux piscines jusqu'à 120m³ • Un moteur de ventilation à 3 vitesses • Une Economie d'énergie de 50 à 70% • Une pression acoustique de 18 à 36 dB à 10 m • Dégivrage automatique par inversion de cycle
En physique, la puissance est la quantité d’énergie par unité de temps fournie par un système à un autre. C’est donc une grandeur scalaire. La puissance correspond à un débit d’énergie : si deux systèmes de puissances différentes fournissent le même travail, le plus puissant des deux est celui qui est le plus rapide.
D’une façon générale, l’intégrale de la puissance P fournie pendant une durée τ représente l’énergie totale fournie :
- .


Dans le système international d’unités, une puissance s’exprime en watts, qui correspondent à des joules par seconde, ou de façon équivalente à des kg.m2 .s−3. Ainsi 1 W = 1 J s−1 = 1 kg m2 s−3. Une unité ancienne était le cheval-vapeur, par lequel la capacité de traction d’une machine à vapeur était comparée à celle d’un cheval de trait.
Vitesse de transformation[modifier | modifier le code]
En tant que grandeur physique, la puissance reflète à la fois la notion de changement matériel dans l’univers, et du temps nécessaire à effectuer ce changement. La puissance se distingue en cela du travail, qui ne prend en compte que le changement, mais non la durée nécessaire.
Ainsi, par exemple, le même travail est effectué lorsqu’une charge pesante est transportée en haut d’un escalier, que le porteur le fasse en marchant ou en courant ; mais la puissance nécessaire dans ce second cas est beaucoup plus grande, car le délai d’accomplissement de ce travail est plus faible.
Un autre exemple paradoxal est que la « combustion complète » d’un kilogramme de charbon produit plus d’énergie que l’explosion d’un kilogramme de TNT : brûler du charbon produit de l’ordre de 15 à 30 mégajoules par kilogramme[1], tandis que l’explosion de TNT produit à peu près 4,7 MJ kg−1 [note 1]. La différence essentielle est en fait une différence de puissance : l’explosion du TNT étant beaucoup plus rapide que la combustion du charbon, la puissance du TNT est bien supérieure à celle du charbon à poids égal, bien que l’énergie intrinsèque du charbon soit supérieure à celle du TNT.
Variables d’effort et de flux[modifier | modifier le code]
D’une manière générale, la puissance est le produit d’une « variable d’effort » (force, couple, pression, tension, etc.) nécessaire à la mise en mouvement contre la résistance du système, par une « variable de flux » (vitesse, vitesse angulaire, débit, intensité du courant, etc.) entretenu malgré cette résistance.
Ainsi, par exemple, la puissance nécessaire pour imposer un déplacement à un véhicule est le produit de la force de traction exercée par la vitesse de déplacement. La puissance d’un moteur rotatif est le produit du couple qu’il transmet par la vitesse de rotation qu’il est capable d’entretenir malgré cette résistance. Une ampoule électrique convertit de l’énergie électrique en lumière et en chaleur, et la puissance ainsi consommée est le produit de la tension électrique par l’intensité du courant électrique qui la traverse[2],[3].
- La puissance moyenne
- La puissance moyenne Pm est l’énergie E délivrée par un phénomène divisée par la durée τ de ce phénomène, soit .

- La puissance instantanée
- La dérivée de l’énergie fournie par rapport au temps, soit
P
m
=
⟨
P
(
t
)
⟩
=
1
τ
∫
0
τ
P
(
t
)
d
t
{\displaystyle \mathcal P_m=\langle \mathcal P Pic au démarrage[modifier | modifier le code]
 Puissance d’un moteur en fonction de sa vitesse de rotation. Au démarrage, la puissance à vitesse nulle tend vers zéro.
Puissance d’un moteur en fonction de sa vitesse de rotation. Au démarrage, la puissance à vitesse nulle tend vers zéro.Dans certains cas, il faut une grande puissance au démarrage (grande énergie sur une courte durée), pour mettre le système en mouvement, mais une fois le système mis en mouvement, il suffit d’une faible puissance pour entretenir le mouvement. En effet, au départ, la puissance doit combattre toute l’inertie du système ; alors qu’en régime continu il n’y a plus qu’à compenser l’élément dissipatif dû généralement aux frottements. C’est notamment le cas lorsqu’il faut vaincre un frottement sec, une force d’inertie, ou en cas d’effet de seuil (exemples : la vitesse minimale de décollage d’un avion ou d’une fusée).
Par exemple :
- une péniche tirée par un cheval sur un chemin de halage demande, au départ, un très grand effort, afin de vaincre la force d’inertie, avant d’obtenir un déplacement sensible. Ensuite il peut avancer au pas, sans s’épuiser, le long du canal ;
- une rame de métro consomme une puissance d’environ un mégawatt pour se lancer, et 10 à 15 fois moins pour maintenir sa vitesse de croisière.
Pour cette raison, la puissance motrice doit alors être surdimensionnée par rapport au strict besoin résultant de la vitesse de croisière ; et inversement, la conduite du système doit prévoir de réduire la puissance après démarrage, afin de ne pas emporter le système au-delà de son régime de fonctionnement normal.
D’autre part, la puissance fournie est donc le produit d’une variable d’effort par une variable de flux, y compris au démarrage d’un système. Si donc au démarrage on impose au système toute la puissance disponible à sa valeur nominale, la « variable d’effort » devra théoriquement prendre une valeur infinie, pour compenser une « variable de flux » initialement nulle. De ce fait, en pratique, la puissance transmise à un système au repos ne peut qu’augmenter progressivement. Mais inversement, une montée en puissance trop rapide peut imposer à la « variable d’effort » un pic instantané sous forme de choc, susceptible de détériorer le système.
Unité de puissance[modifier | modifier le code]
L’unité de puissance du SI est le watt (symbole : W), qui correspond à un joule par seconde.
Curieusement, on utilise encore le cheval-vapeur dans le cas des moteurs thermiques :
- 1 ch = 736 W environ.
Par abus de langage, on attribue la puissance à l’objet qui la transforme, par exemple :
- un moteur de 100 ch ;
- une lampe de 100 W.
Dans ce cas il peut s’agir de :
- la puissance maximale (moteur à plein régime, ou à régime donné) ;
- la puissance nominale sous condition de fonctionnement (par exemple lampe à incandescence alimentée en 230 V).
C’est un principe fondamental en mécanique, il met sous forme variationnelle les équations traditionnelles de la mécanique. Il permet aussi d’établir des relations entre les puissances extérieures d’un mécanisme (et donc d’obtenir des lois entrée/sortie par exemple).
- Puissance des interactions
- En particulier, dans une liaison parfaite, la puissance des interactions est nulle. On obtient cette grandeur par le calcul du co-moment des torseurs cinématique et statique de la liaison.
Puissance mécanique[modifier | modifier le code]
- Puissance d’une force
- La puissance mécanique d’une force est l’énergie que l’on peut acquérir ou perdre avec cette force sur un temps donné.
Si le point d’application d’une force (en newtons) se déplace à la vitesse instantanée (en m/s), alors la puissance instantanée vaut (en watts) :
- .
On retrouve aisément ce résultat en dérivant le travail d’une force.
- Puissance d’un couple
- Si l’objet est en rotation sous l’action d’un couple (en newton mètres) et tourne à la vitesse angulaire instantanée (en radians par seconde), alors la puissance instantanée vaut (en watts) : .
- Puissance des torseurs
Puissance électrique[modifier | modifier le code]
La puissance électrique que l’on note souvent P et qui a pour unité le watt (symbole W) est le produit de la tension électrique aux bornes de laquelle est branchée l’appareil (en volts) et de l’intensité du courant électrique qui le traverse (en ampères) pour des appareils purement résistifs.
Régime continu[modifier | modifier le code]
 Schéma de la puissance dissipée dans une résistance.
Schéma de la puissance dissipée dans une résistance.En régime de tension et de courant continu, avec U et I les valeurs constantes de la tension aux bornes du dipôle et de l’intensité du courant à travers le dipôle.
En particulier, si R est la résistance d’un dipôle, alors on a :
- .
Cela conduit à l’expression de la puissance :
- .
D’un point de vue électrique, on peut modéliser un dipôle actif linéaire (électromoteur) par un Modèle équivalent de Thévenin (MET). Remarque : ce modèle est très sommaire et ne rend compte que de la chute de tension en charge ou des puissances électriques mises en jeu que dans un domaine de validité qui doit toujours être précisé. En convention générateur (flèche de tension et sens du courant dans le même sens), le schéma équivalent du dipôle est donc le suivant :
En convention générateur, la puissance fournie par le dipôle à l’extérieur s’écrit par définition :
- .
La puissance fournie Pfournie par le dipôle actif correspond donc à la puissance fournie par un générateur idéal de tension E délivrant un courant I dont une partie, , est dissipée par effet Joule. Dans le cas des moteurs électriques, le terme EI est appelé puissance électromécanique et souvent noté .
Régime alternatif[modifier | modifier le code]
Si la tension et le courant varient, la puissance instantanée consommée par un dipôle est égale au produit des valeurs instantanées du courant qui le traverse et de la tension à ses bornes.
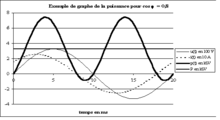 La courbe ci-dessus représente la puissance consommée par un dipôle soumis à une tension sinusoïdale de valeur efficace égale à 230 V, traversé par un courant également sinusoïdal de valeur efficace égale à 18 A et dont le facteur de puissance est égal à 0,8. On constate que la puissance instantanée varie entre +7,45 kW et -0,83 kW soit une amplitude de variation de 8,3 kW (2UI) et une moyenne d’environ 3,3 kW = UI cos φ.
La courbe ci-dessus représente la puissance consommée par un dipôle soumis à une tension sinusoïdale de valeur efficace égale à 230 V, traversé par un courant également sinusoïdal de valeur efficace égale à 18 A et dont le facteur de puissance est égal à 0,8. On constate que la puissance instantanée varie entre +7,45 kW et -0,83 kW soit une amplitude de variation de 8,3 kW (2UI) et une moyenne d’environ 3,3 kW = UI cos φ.















En régime sinusoïdal, le courant et la tension ont pour expression :
- Puissance thermique[modifier | modifier le code]
La puissance thermique (ou puissance de chauffage) est la quantité de chaleur (ou transfert thermique) traversant une surface isotherme par unité de temps. Il s’agit donc d’un flux de chaleur qui s’exprime en watts (et ses multiples : kilowatts, mégawatts…), la quantité de chaleur étant exprimée en joules et le temps en secondes. D’autres unités, devenues obsolètes, sont la kilocalorie par heure (kcal/h) et la thermie par heure (th/h).
Par exemple, la puissance thermique d’un radiateur est de l’ordre de 1 000 watts (1 kW), tandis que celle d’un réacteur nucléaire peut atteindre plus de 1 000 MW (1 GW).
D’après le premier principe de la thermodynamique, la puissance thermique et la puissance mécanique sont équivalentes. D’après le second principe de la thermodynamique, la transformation de puissance thermique en puissance mécanique n’est pas intégrale, il y a toujours une puissance thermique dissipée. La puissance thermique s’écoule toujours des régions les plus chaudes vers les régions les plus froides.
Dans le cas d’un transfert thermique par conduction, on introduit de manière unidimensionnelle la densité de flux thermique :
- .
La loi de Fourier généralise cette densité de flux dans toutes les directions. Le vecteur densité de flux thermique est défini par :
- .
Cette expression de la propagation de chaleur présente deux avantages :
- elle est tridimensionnelle (elle exprime la propagation dans toutes les directions de l’espace) ;
- on peut librement utiliser les coordonnées de notre choix (cartésiennes, cylindriques ou sphériques).
Le choix des coordonnées dépend de la symétrie du problème. Par exemple, pour étudier la chaleur produite par un fusible (cylindrique), on utilise les coordonnées cylindriques[note 2].
La puissance thermique (notée PQ) à travers une surface S[note 3] est par définition, le flux du vecteur à travers la surface S, c’est-à-dire :
- .
Puissance acoustique[modifier | modifier le code]
La puissance acoustique, ou puissance sonore, est la quantité d’énergie que transporte une onde sonore par unité de temps à travers une surface donnée. Elle dépend de l’amplitude de cette onde sonore et de la surface.
Dans le cas général, elle est donnée par la formule :
où P est la puissance, I est l’intensité sonore, et dS l’élément de surface atteint par l’onde sonore.
Pour une source isolée, le calcul de la puissance acoustique totale émise correspond à l’intégrale ci-dessus étendue sur une surface fermée.
En France, le domaine de l’automobile, l’administration et les assureurs utilisent une puissance dite « fiscale » pour déterminer le montant de certaines taxes et primes. Cette puissance est dimensionnée en « cheval fiscal » (noté « CV » en droit fiscal français), qui n’est en rien comparable à une puissance au sens physique. Depuis , la puissance fiscale dépend de la valeur normalisée d’émission de dioxyde de carbone (CO2) en g/km et de la puissance maximale du moteur en kW. Si on note C la quantité de CO2 rejetée (en g/km) et P la puissance du moteur (en kW) la puissance fiscale est : ;
En Belgique, seule la cylindrée du moteur est prise en compte pour le calcul de la puissance fiscale[4],[5].
Notes[modifier | modifier le code]
Références[modifier | modifier le code]
- (en) Juliya Fisher, « Energy Density of Coal », The Physics Factbook, (consulté le )
- (en) Halliday and Resnick, Fundamentals of Physics, , « 6. Power »
- Chapter 13, § 3, The Feynman Lectures on Physics Volume I, 1963 p. 13-2,3.
- Le Moniteur automobile, La nouvelle taxe de circulation, 23 décembre 2013.
- Service public fédéral Finances, Tarifs de la taxe de circulation 2013-2014 « Copie archivée » (version du 14 juillet 2014 sur l’Internet Archive), 23 juillet 2013.
Articles connexes[modifier | modifier le code]
Liens externes[modifier | modifier le code]



 Puissance thermique
Puissance thermique




